作为低端扫地机器人的标配,便宜成了视觉导航的最大卖点。
便宜≠弥补缺陷
得益于视觉传感器的低成本特性,视觉导航方案的整体成本一直低于激光导航方案,加之在智能化开发方面的巨大潜力,让它迅速成为了目前最主流的导航方案之一,甚至业内普遍认为视觉导航或许将会取代激光导航。不过现实很骨感,想要实现这一愿望,仅靠便宜还远远不够。
到目前为止,视觉导航只是作为低端机的标配,排除厂家产品策略的影响,视觉导航不好用是根本原因。在实际表现中暴露出的不稳定、精度低、易受环境光线影响等缺陷,给人留下了一个不靠谱的印象。
从技术发展来看,由于视觉导航技术起步相对较晚,在理论、技术和产品落地方面都落后于激光导航技术,加之视觉开发的高门槛特性,造就了视觉方案的稀缺性和发展滞后性。不过随着近几年,越来越多的企业投入到视觉行列,视觉技术的发展正在突飞猛进,不乏有不弱于激光导航表现的视觉方案出现,如INDEMIND推出的「家用机器人AI Kit」视觉导航方案。
提升视觉表现,需要系统性方案
「家用机器人AI Kit」是以INDEMIND自研的INDEMIND OS Lite家用机器人AGI系统为核心,搭配面向家用小型机器人专门研发的一体化立体视觉模组,可实现家用机器人导航定位、智能避障、路径规划、决策交互等核心功能,是包含软硬件的ALL IN ONE解决方案。
从2021年推出至今,INDEMIND基于视觉技术路线,不断开发完善,「家用机器人AI Kit」在经过近百次迭代后,在定位精度、鲁棒性等方面取得了跨代式进步。
从视觉导航缺陷的底层原因出发,精度问题、稳定性问题等,本质是一个系统性问题,单纯的针对一个问题,只是治标不治本,想要根本解决,需要从全局架构出发。影响视觉导航精度和稳定性的因素无外乎是算力、光线、算法成熟度,因此INDEMIND设计了一个开拓性的轻量化平台,在不增加软硬件成本的情况下,保障性能的同时,完成了从算法到硬件的集体“瘦身”。

平台包括轻量化VSLAM(基于深度学习特征的SLAM架构)、轻量化Depth(基于深度学习特征匹配的Depth)、轻量化深度学习模型(底层算子自研、剪枝、量化)等,同时还在硬件上,对于视觉处理采用NEON加速、GPU加速、DSP加速等方式,提升计算性能,显著降低了算力要求,在测试中,已能够在几美金的计算平台上稳定运行整套VSLAM算法。
目前,「家用机器人AI Kit」搭载4核A53/A55级别芯片即可满足需求,能够适配如RK3566(全解决方案情况下,双目视觉多传感器融合SLAM、双目Depth、物体识别及整机完整SDK)。需要提到的是,现有的大部分视觉导航方案在算力上大多需要TX2及以上,甚至PC级算力需求,且对CPU、GPU或NPU、内存均有较高要求。为了应对光线适应问题,INDEMIND开发了一套系统化环境补光策略,包含主动式环境补光配置和光照变化条件下的建图策略。
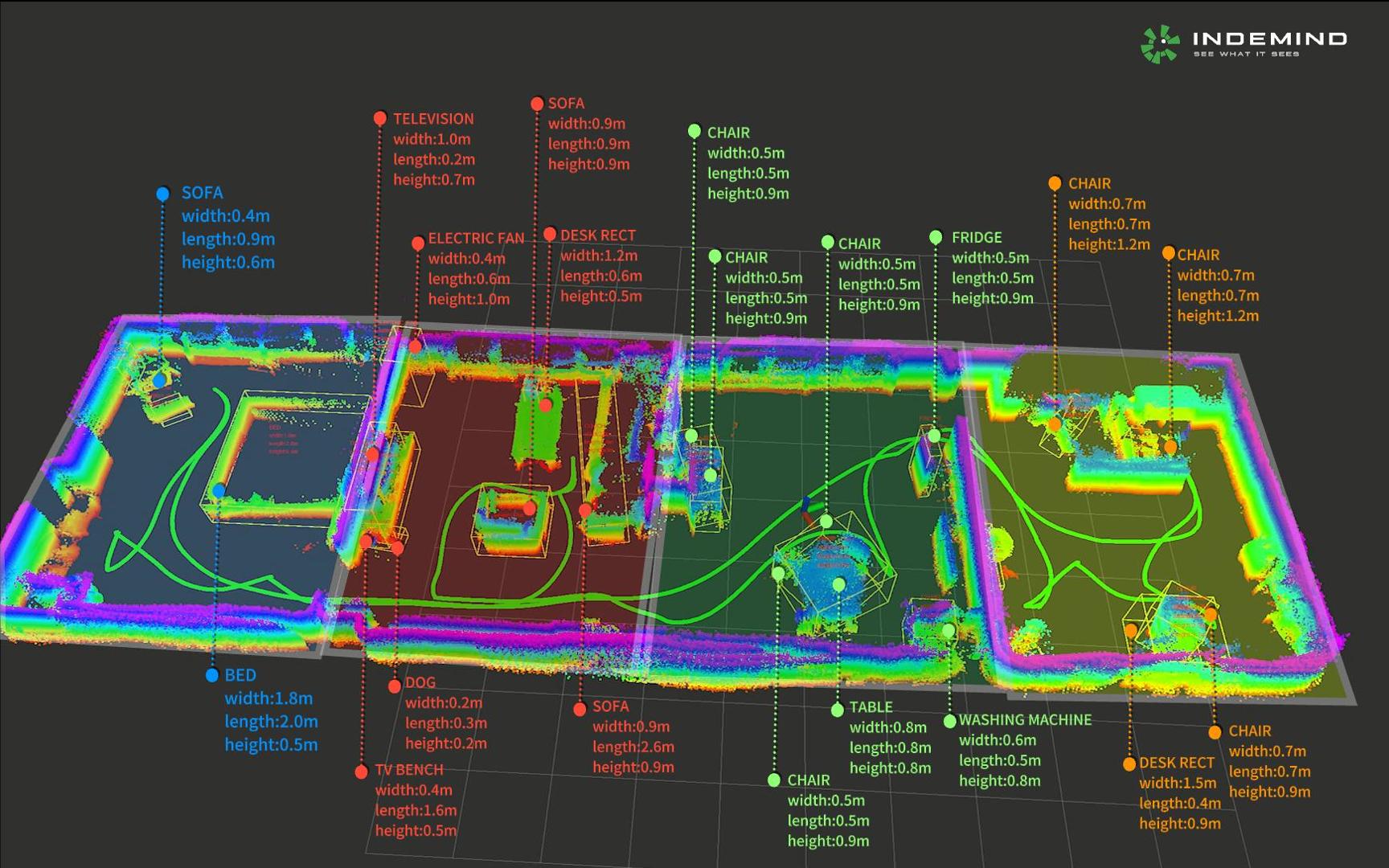
在实际表现中,面对强光直射、无光源、昏暗等特殊光照环境均能无差异工作,且机器人导航精度已能实现绝对定位精度<1%,姿态精度<1°,足以媲美激光雷达,此外与激光导航或激光融合导航不同的是,INDEMIND还首创了真全屋三维建图,接近1:1还原的真实感。
事实上,想要替代激光导航及激光融合方案,做到这些仍然不够,真正的“赢点”,而是智能化,是智能识别、智能地图、智能避障、智能交互等多种关键功能的实现。为此,INDEMIND用多年时间,专门开发了一套智能决策引擎。

基于高精度三维建图能使机器人在语义层次上理解环境信息,模仿人类大脑对环境理解的方式,并进行策略处理。配合INDEMIND的AI识别技术,机器人可以识别物体、人、动物及空间语义,因此,在避障上,机器人可做出类人规避动作的精细化操作,能够让机器人有策略的实现智能避障(如根据障碍物不同做出不同规避距离)。在交互上,可通过语音、手势、动作等自然语言指令,命令机器人进行安全、搜寻、跟随、自主寻路、定向清扫等多种智能逻辑。以定向清扫为例,发布语音命令:“清扫一下厨房”可被识别为针对地图上识别到的厨房区域进行一次规划清扫。