支持全屋二维地图、三维地图及语义地图自主创建,支持地图动态更新及智能禁区。单张地图面积≤400㎡,支持多张地图存储。
提供沿边、弓形、局部、指定区域、巡逻等多种路径规划模式,满足机器人作业要求。
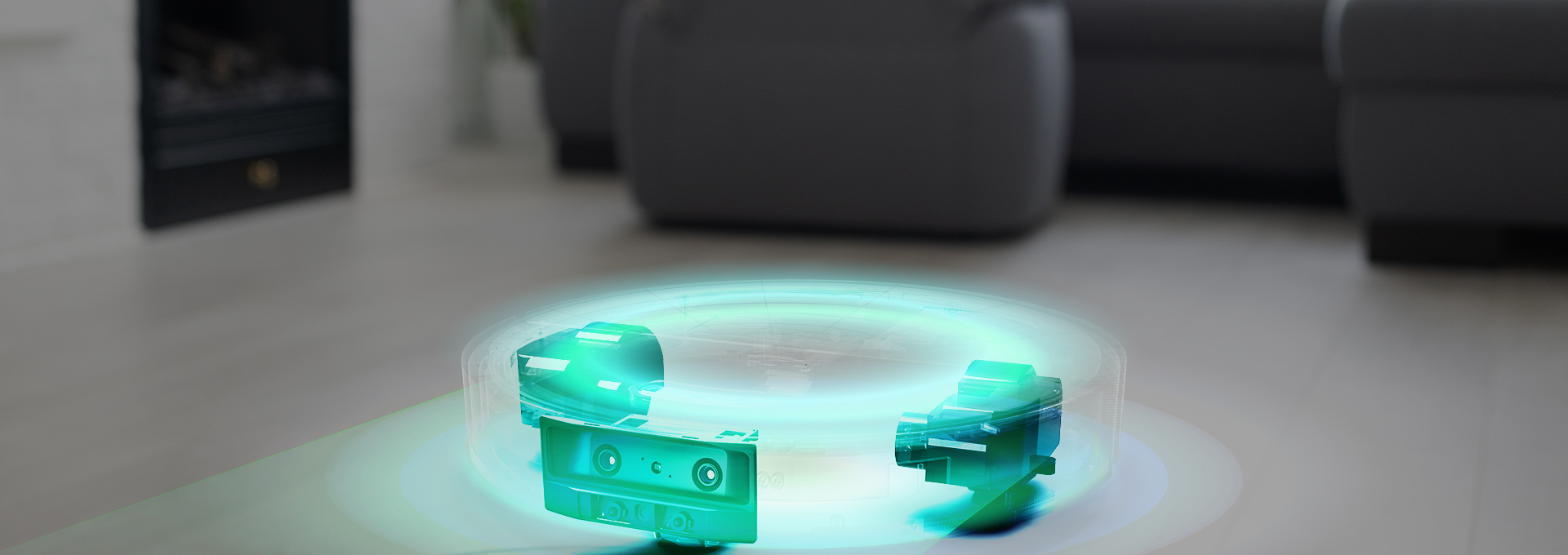
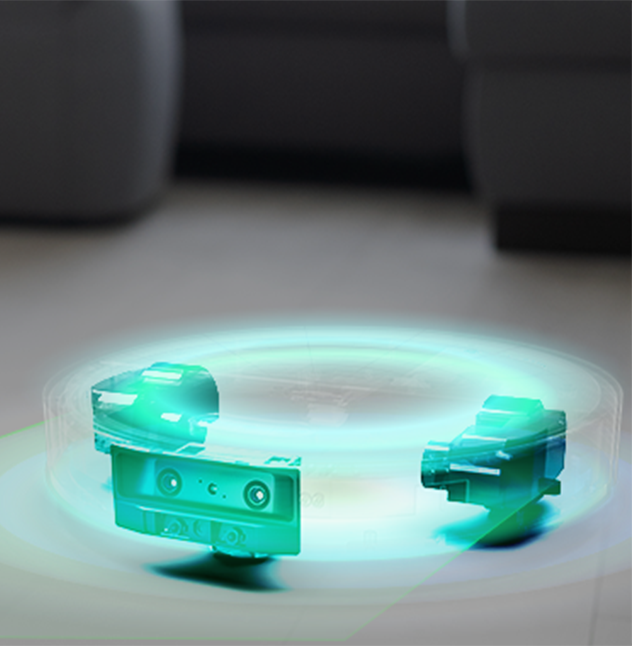
准确检测低矮障碍物(例如:动物粪便、拖鞋、钥匙串、线材、地插等)、高透障碍物、动态障碍物等,可实现复杂环境下的无碰撞清扫,同时降低被困率。
基于视觉AI技术,对家具、电器、人宠、场景及其他常见物体的语义及位置进行精准识别
基于自研脏污识别技术,支持固态、液体、粉末及固液混合四类脏污识别,整体检出率>95%
适应光线场景:常规场景、昏暗场景、黑暗场景、高亮场景
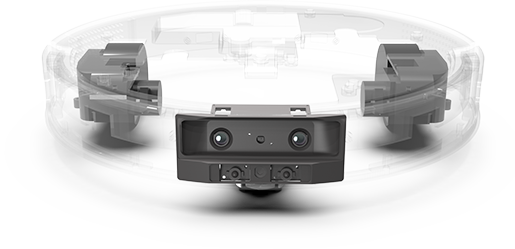
家用具身扫地机器人AI平台通过强光规避策略,以及内置的亮度补光、纹理补光两种红外补光设备(均符合人眼安全等级C1等级要求),满足强光直射、无光源、昏暗等特殊光照环境下的无差异工作要求。
基于决策交互技术,可通过语音、手势、动作等自然语言指令,控制机器人执行指令作业、场景策略作业、脏污清洁策略等
基于物体识别结合立体视觉技术实现智能目标跟随,配合上层交互指令,进行后续作业任务。
家用具身机器人AI平台通过行业批量验证的标准化模组硬件,配合行业成熟的机器人参考设计,降低机器人导航传感器布局限制,快速适配各类型家用机器人产品,解决企业研发端的关键需求,缩短研发周期。
立即咨询





微信助手
微信搜索INDEMIND
官方电话
010-5289 4598
工作日 10:00-18:00